北京市凌鹰起重机械厂
地址:北京市昌平区东小口
二十四小时手机:18611422091(同微信)
传真: 010-58043523
抖音:lyqz18611422091
扫一扫加微信好友




1、主动行走机构的结构和工作原理
电动葫芦主动行走机构的作用是带动电动葫芦行走,与起重机大车行走机构配合,就可以把载荷运送到起重机覆盖的任何区域,具体组成如图5。
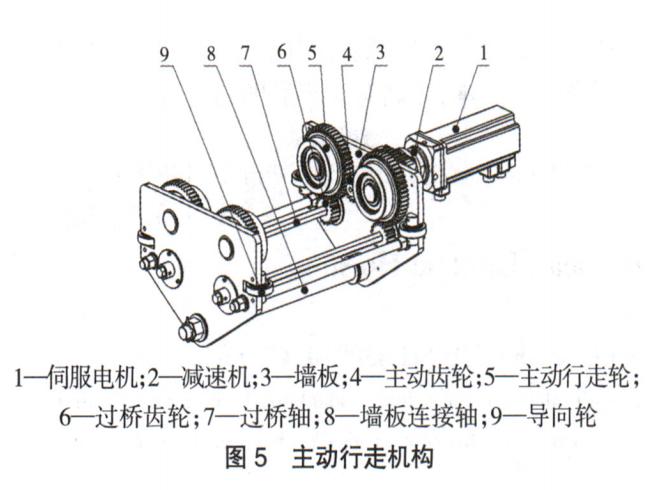
1.1墙板的设计
墙板是电动葫芦行走机构的主要结构件,与过桥轴、墙板连接轴一起组成行走机构的结构框架。墙板分为左右两块,右侧墙板固定有减速机,减速机一端固定有伺服电机,另一端固定有主动齿轮。主动齿轮与两个固定在右侧墙板上的主动行走轮啮合,主动行走轮与固定在右侧墙板上的过桥齿轮啮合,过桥齿轮连接过桥轴,驱动固定在左侧墙板上的过桥齿轮,进而驱动固定在左侧墙板上的主动行走轮,实现电动葫芦行走机构四个主动行走轮的同步运行。
1.2主动齿轮的设计
主动齿轮固定在减速机的输出端,同时与两个主动行走轮啮合,当主动齿轮转动时,带动两主动行走轮同步转动。主动齿轮是行走机构动力的主要传动者,需要有足够的强度和硬度,此处选择40Cr作为齿轮的材料,调质处理,齿部淬火,以保证齿轮硬度达到使用要求。齿轮模数为4,齿数为16,分度圆直径为64mm。
1.3主动行走轮的设计
每个墙板上有两个主动行走轮,一套行走机构上有4个主动行走轮,主动行走轮是滚轮和齿轮的结合体。滚轮踏面直径150 mm,齿轮分度圆直径196 mm,齿轮模数为4,齿数为49,轮的材料为40Cr,调质处理,齿部淬火。主动行走轮转动,带动与其啮合的过桥齿轮转动,进而带动对侧墙板上的主动行走轮同步转动,从而推动行走机构行走。
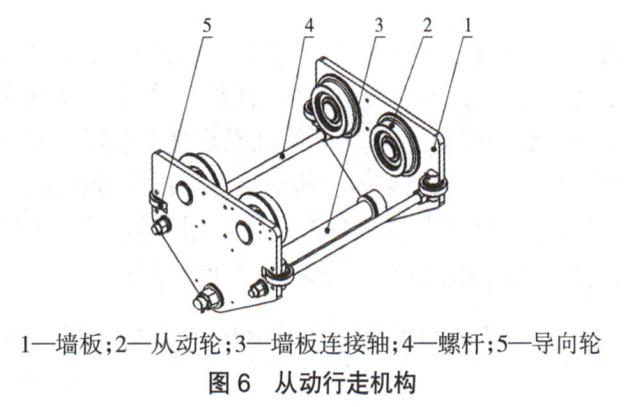
2、从动行走机构的结构和工作原理
从动行走机构不提供动力,主要作用是从结构上保持葫芦行走过程的稳定。主要结构如图6所示,2个墙板、1个墙板连接轴以及2个螺杆组成从动行走机构的主框架,每个墙板上分别固定有2个对称布置的从动轮,和2套导向轮,从动轮踏面直径和主动行走轮踏面直径保持一致,保证在葫芦行走过程中,从动轮和主动行走轮同步运行。
欧式电动葫芦的试验验证:此电动葫芦样机制作完成后,在厂内完成了出厂试验和型式试验。出厂试验包括一般性检查、空载试验、额定载荷试验、动载试验、安全制动器试验。按照标准的试验方法,各试验数据均满足规范和设计输入要求。型式试验包括一般性检查、静载试验和动载试验。按照标准的试验方法,各项试验数据均满足规范和设计输入要求。之后电动葫芦安装在生产车间的智能行车上,在生产车间实际使用测试,各项试验数据均满足规范和实际使用需求。至此该葫芦研发设计并制造成功。该葫芦的成功设计和制造,进一步降低了公司产品的成本,提高对该产品的自主性。
上一条:电镀车间使用双钩环链电动葫芦更具优势
下一条:阐述手动液压搬运车液压系统的设计

北京市凌鹰起重机械厂
地址:北京市昌平区东小口
二十四小时手机:18611422091(同微信)
传真: 010-58043523
抖音:lyqz18611422091
扫一扫加微信好友

版权所有 Copyright © 2009-2015 北京市凌鹰起重机械厂 网站地图
备案号 京ICP备11048170号 电话:18611422091

